Leaping Springtails
Super tiny and super fast
This tiny animal, roughly the size of a grain of rice, can jump hundreds of times its body length in under a second, and look graceful doing it.
Springtails (Collembola) are the largest group of non-insect hexapods. They are well known for their impressive leaps off a myriad of different substrates. However, we know surprisingly little about the mechanisms and behaviors behind their ultrafast jumps.
It was assumed that these tiny jumpers couldn’t control their high-speed leaps or landings, but our research shows they can control every aspect of their jumps— from the directional take-offs to aerial righting, and even stabilized landings. These tiny jumpers offer novel insights into biological ultrafast movements and bio-inspired design of robotic jumpers.
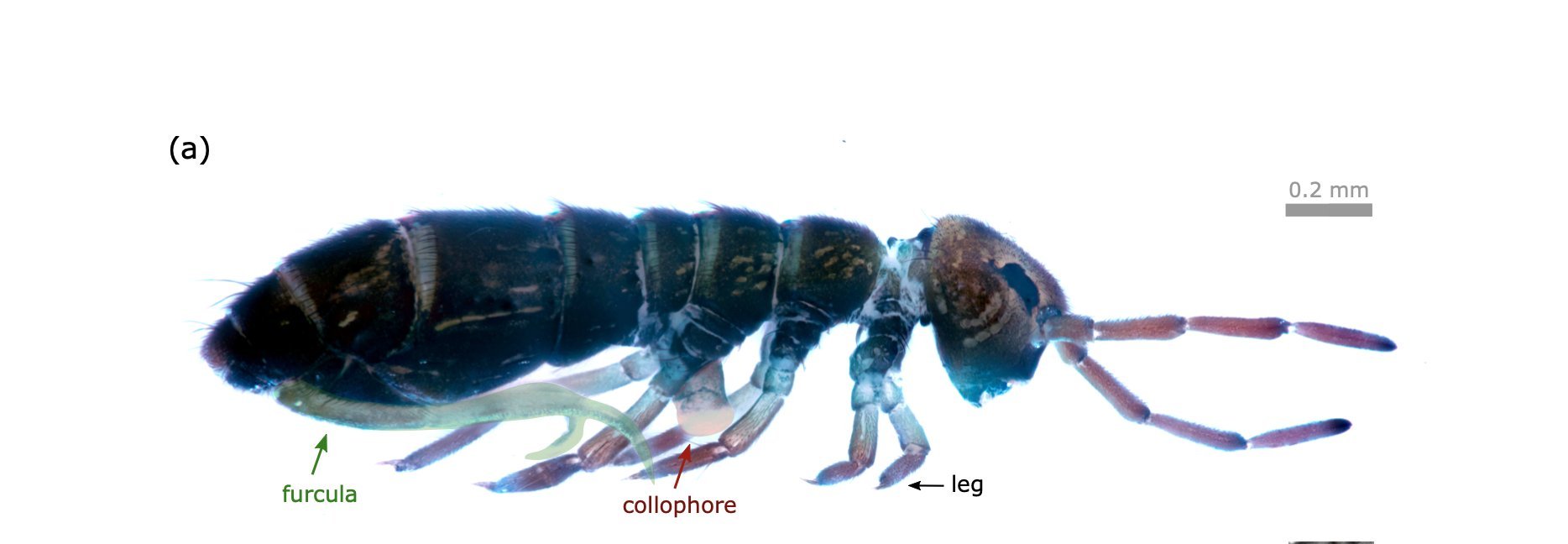
Semiaquatic springtail (I. retardatus) with its manubrium-furcula and collophore highlighted in green and red, respectively.
This project has been featured in the New York Times, Smithsonian magazine, and more.
Major questions
1) How can springtails jump so well?
2) How do springtails control their take-off and landing at such high accelerations?
3) How can we apply these insights into ultrafast, robotic jumpers?
What we’ve discovered
Springtails can orient themselves in midair to land on their feet.
After it leaps off the ground, the springtail will adopt a specific body posture that helps orient them in mid-air. Impressively, the springtail can right itself in the air in under 20 milliseconds!

Springtails use water droplets to stabilize and control their landing.
When leaping off the water, the springtail will often use an organ called a collophore to hold a small droplet of water underneath them. This droplet aids in aerial righting but also plays a major role in landing. As the springtail impacts the substrate during landing, the droplet will make first contract and dissipate energy, allowing the springtail to maintain balance and land on its feet.
The bio-inspired design of springtail jumps opens a new pathway for controlled, repeatable jumps for micro-robots.
In collaboration with Dr. Jesung Koh, we built a jumping robot inspired by the springtails’ jumps. Impressively, our springtail robot could right itself in the air and land on its feet 75% of the time. Controlled landing in jumping robots is an understudied area; most research on robotic jumpers focuses on the take-off. Building a robot that reliably lands on its feet means it would be able to immediately jump again, which is a significant leap forward for robotic jumpers.

"This work shows just how important controlled motion is for predator escape and survival.
Springtails could not have become the most abundant non-insect hexapod without being able to control their gymnast-like escape response.
In addition to being fascinating to watch, this new understanding of the biomechanics of how springtails control their jump, spin in midair, and land safely on water could lead to advances in fields from robotics to aerodynamics."
Dr. Kathryn Dickson, Program Director of the Physiological Mechanisms and Biomechanics Program, National Science Foundation
Read the papers
Passive Aerial Righting and Safe Landing of a Small Bio-inspired Jumping Robot. IEEE (2024).
Directional takeoff, aerial righting, and adhesion landing of semiaquatic springtails. Proceedings of the National Academy of Sciences (2022).
Air-to-land Transitions: From wingless animals and plant seeds to shuttlecocks and bioinspired robots. Bioinspiration & Biomimetics (2023).

